魏新华研究员团队突破了农机复杂作业路径规划、高精度组合导航、无人化农机自动驾驶自主作业共性软硬件、无人化农机远程监控云平台、拖拉机耕深稳定调控、收割机作业负荷反馈调控、施药机变量对靶喷施、多机协同集群控制等关键技术8项;创新研发无人化拖拉机、插秧机、施药机、收割机等装备4类,水田作业误差≤8cm,旱田误差≤2.5cm,具备全田块无人化作业能力;构建无人化“耕种管收”装备技术体系,相关成果在江苏、上海、山东、新疆等多地应用示范。
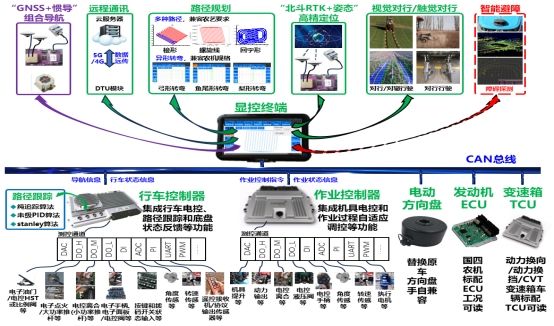
图1 农机通用组合导航无人驾驶技术及系统
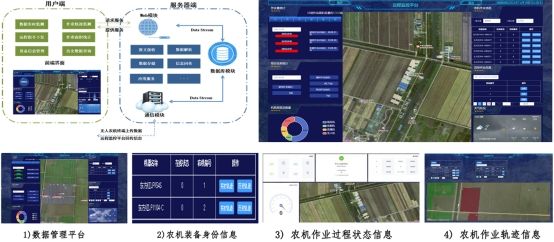
图2 作业过程远程监控系统

图3 无人拖拉机

图4 无人施药机

图5 无人联合收割机

图6 多机协同编队转场

