刘继展教授团队联合南京农业大学、中国科学院沈阳自动化研究所、中科新松有限公司,开展了农用低惯量耐冲击变刚度关节模组设计制造、农用刚柔耦合类人最简双指灵巧手设计与控制、农用多任务灵巧重构的机械手自适应控制技术与系统、农用型机械手集成应用与性能验证等研究,开发3代变刚关节、2代灵巧手,关节变刚控制器1套,轮足人形机器人、端到端机器人行为训练平台2套,项目成果入选2025年度农业农村部农业“火花技术”,获批江苏省工信厅农业机器人中试平台、常州龙城实验室——农业机器人工程中心,牵头组建中国农业工程学会人工智能和农业机器人专业委员会。
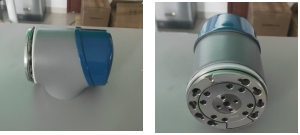
图1 3代变刚关节
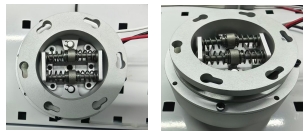
图2 2代灵巧手

图3 轮足人形机器人

